bus can arduino
|
Etude & mise en œuvre dun réseau de capteurs basé sur le bus CAN
5 juil 2022 · Le MCP2515 est un contrôleur CAN qui communique avec l'Arduino via le bus SPI et une ligne d'interruption qui permet au MCP2515 de signaler à l' |
|
Polycopié ABAINIA Kheireddinepdf
Dans ce TP nous allons faire communiquer deux Arduino via le bus CAN vu que les équipements de l'automobile ne sont pas à la porter de tout le monde pour les |
|
Projet SPI: Le Bus CAN 03/15
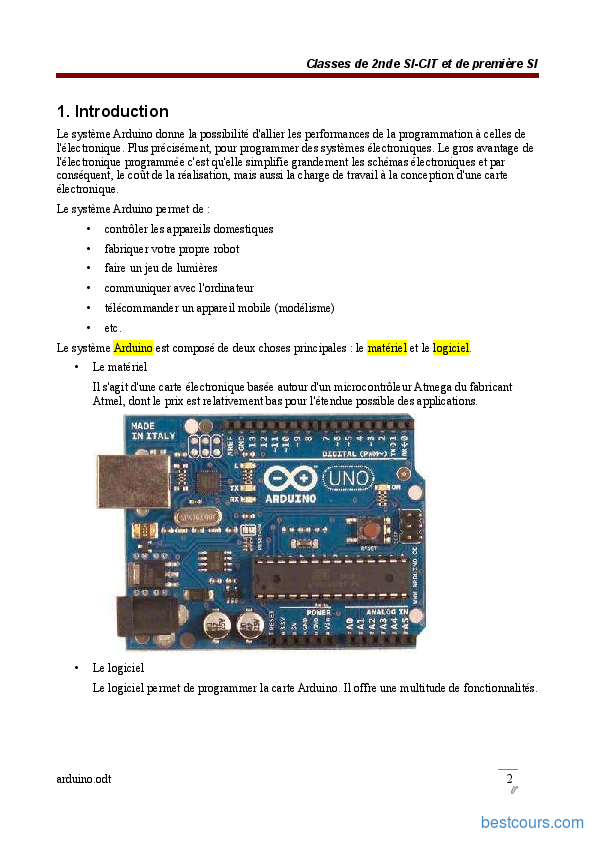
La carte Arduino Uno est un module sur lequel se trouve un microcontrôleur qui peut être programmé pour analyser et produire des signaux électriques Nous avons |
|
SHIELD BUS CAN
La carte shield « CAN-BUS » permet de mettre en œuvre une interface de communication via un bus CAN Cette carte intègre un contrôleur CAN MCP2515 et un |
|
TP BUS CAN ARDUINO
Objectif final : Mettre en service le bus CAN pour échanger des données entre 2 cartes Arduino Uno équipées de shield bus CAN Compétences abordées : |
|
TP4: Utilisation du bus CAN
Dans ce TP nous utilisons la carte Arduino avec un module CAN pour faire communiquer deux Arduino via le bus CAN dans l'absence d'équipements |
|
Arduino® Portenta Breakout Board
Technical Education: The Portenta Breakout board can act as a first point of entry for technician education in CAN Bus Transmission Line. |
|
DETECTION AND WARNING OF PASSENGER COUNT IN BUSES
Indian buses can accommodate a maximum of only 80 people. But in our country KEYWORDS:ARDUINO UNO |
|
Untitled
GND. Switch jumpers to select between. OBD-II or CAN pinout on DB9 connector. See table for configurations. X1. NC1. C. PIN2. |
|
MCP2551 (PDF)
It also provides a buffer between the CAN controller and the high-voltage spikes that can be generated on the CAN bus by outside sources (EMI ESD |
|
CAN BUS COMMUNICATION DEMONSTRATION TOOL FOR
19-May-2021 MCU Arduino UNO |
|
Robu.in
This CAN-BUS Shield adopts MCP2515 CAN Bus controller with SPI interface and. MCP2551 CAN transceiver to give your Arduino/Seeeduino CAN-BUS capability. |
|
Vehicle Tracking System for School Bus by Arduino
The aim of this project is to design & develop a vehicle tracking system using GPRS which can be easily controlled by arduino uno. In this modern fast moving. |
|
LTC6820 isoSPI/Isolated CAN Arduino
DC2617A includes the LTM2889 isolated CAN transceiver to connect to a CAN bus on the standard 9-pin sub-D connector. An onboard controller (MCP2515) provides. |
|
Controller Area Network (CAN) Bus Simulator and Data-logger for In
Figure 23: Simulated CAN-Bus Signal for Four State Transmission State?… The Arduino micro-controller and CAN-bus shield communication via SPI interface. |
|
CAN-BUS Shield
08-Jul-2014 This CAN-BUS Shield adopts. MCP2515 CAN Bus controller with SPI interface and MCP2551 CAN transceiver to give your. Arduino/Seeeduino ... |
|
TP BUS CAN ARDUINO - Cours
Objectif final : Mettre en service le bus CAN pour échanger des données entre 2 cartes Arduino Uno équipées de shield bus CAN Compétences abordées : |
|
TP4: Utilisation du bus CAN
Dans ce TP nous utilisons la carte Arduino avec un module CAN pour faire communiquer deux Arduino via le bus CAN dans l'absence d'équipements |
|
SHIELD BUS CAN
Pour utiliser le shield « Bus CAN » il est nécessaire d'enficher le shield sur une carte Arduino Ensuite il faut connecter les lignes CAN_H et CAN_L du |
|
Le bus CAN (control Area Network) - LAAS-CNRS
Les circuits logiques programmables - FPGA 2 Contenu : I Introduction : Notion de multiplexage II La notion de bus de communication III Le bus CAN |
|
Mise en oeuvre du Bus CAN entre modules Arduino (2) - Locoduino
On commence par relier à la carte CAN les broches du bus SPI ainsi que le +5V et le 0V (Gnd) Ajoutons une liaison entre la broche INT (interruption) de la |
|
Bus de communication et réseaux - université 8 Mai 1945 Guelma
Et pour ce faire on a besoin de deux Arduino Uno deux modules CAN Bus MCP2515 et des fils de prototypages Le module MCP2515 met en place une interface SPI |
|
TP BUS CAN ARDUINO NOM : Date : - PDF Free Download
NOM : Date : Objectif final : Mettre en service le bus CAN pour échanger des données entre 2 cartes Arduino Uno équipées de shield bus CAN |
|
CAN Bus Arduino PDF - Scribd
103 · CANBUSISO Transport Protocol ISO Transport Protocol() · CAN Controller (MCP2515) MICROCHIP · CAN (Controller Area Network) · Robert Bosch GmbH () · ISO/OSI |
|
Etude & mise en œuvre dun réseau de capteurs basé sur le bus CAN
5 juil 2022 · (Arduino Uno) d'un contrôleur CAN MCP2515 intégrant un émetteur/récepteur TJA1050 et Page 9 9 d'un certain nombre de capteurs et/ou |
Quel est le rôle du bus CAN ?
Le bus CAN est un système de normes de bus qui permet à plusieurs unités de commande électronique des véhicules de communiquer. CAN est l'abréviation de Controller Area Network.Comment lire un bus CAN ?
Les stations sont cablées sur le bus par le principe du "OU cablé", en cas de conflit c'est à dire emission simultanée, la valeur 0 écrase la valeur 1. On appel donc l'"état dominant" l'état logique 0, et l'"état récessif" l'état logique 1.Comment se fait le codage des données sur le bus CAN ?
La succession de bits transitant sur le bus est codé avec la méthode du NRZ (Non Return To Zero). Pendant la durée totale du bit, le niveau de tension de la ligne est maintenu, c'est à dire que pendant toute la durée durant laquelle un bit est généré, sa valeur reste constante qu'elle soit dominante ou récessive.- La plupart des réseaux CAN de véhicule fonctionnent à une vitesse de bus de 250 Ko/s ou de 500 Ko/s, bien qu'il existe des systèmes dont le fonctionnement atteint jusqu'à 1 MHz.
Comment fonctionne bus CAN ?
. Ce protocole, ainsi que les paramètres électriques de la ligne de transmission, sont fixés par la norme 11898.
Pourquoi le bus CAN ?
. CAN est l'abréviation de Controller Area Network.
Comment contrôler le bus CAN ?
. Brancher le voltmètre (réglage tension continue – calibre 20V ou automatique), fil noir sur une bonne masse, et : • fil rouge sur le point de test L : on devrait avoir une tension comprise entre 1.8 et 2.6 V. fil rouge sur le point de test H : on devrait avoir une tension comprise entre 2.4 et 3.2 V.
Quelles sont les 3 sections principales de la carte Arduino Uno ?
. Entrées et sorties numériques (Digital) : - Permet de brancher des actionneurs. - Permet de brancher des détecteurs.
. Microcontrôleur : - stocke le programme et l'exécute.
|
TP BUS CAN ARDUINO
Les documents des différents composants du shield bus CAN Seeedstudio et de la carte Arduino Uno figurent sur le site La représentation en couches de l' |
|
SHIELD BUS CAN
La communication entre le shield « Bus CAN » et la carte Arduino est réalisée au moyen de la liaison SPI Les signaux SCK, MISO, MOSI sont par défaut transmis |
|
TP4: Utilisation du bus CAN
Dans ce TP, nous utilisons la carte Arduino avec un module CAN pour faire communiquer deux Arduino via le bus CAN, dans l'absence d'équipements |
|
Controller Area Network Prototyping With Arduino: Creating CAN
The CAN bus is primarily used in embedded systems, and as its name implies, is a network technology that provides fast communication among microcontrollers |
|
CAN-BUS Shield V12 - Reichelt
This CAN-BUS Shield adopts MCP2515 CAN Bus controller with SPI interface and MCP2551CAN transceiver to give your Arduino/Seeeduino CAN-BUS |
|
Diseño de una red CAN bus con Arduino - Academica-e
sí solo En este caso, el shield es el encargado de la comunicación con el protocolo CAN, ya que hace de interfaz entre el puerto serial del Arduino y CAN bus |
|
Le bus CAN - LAAS-CNRS
Les circuits logiques programmables - FPGA 1 Introduction aux Protocoles de communication : Le bus CAN (control Area Network) Fabrice CAIGNET LAAS - |
|
Development of a Low-cost Automotive - Asee peer logo
The CAN network (or CAN bus) is a form of serial communication to transfer experiments were based on Seeed Studio CAN Shield,6 Arduino Mega board |

 Arduino Programming (PDF) 2 books in 1 - The Ultimate Beginne")
![PDF] Arduino à l'école cours et formation gratuit](https://ebooks-it.org/e-books/apress/_images/med_Apress.Pro.Arduino.Jun.2013.ISBN.1430239395.pdf.jpg "PDF] Arduino à l'école cours et formation gratuit")

")



 « Adafruit Industries – Makers hackers")

 LabVIEW for Arduino 控制與應用的完美結合_封面")


![PDF] Arduino cours et formation gratuit](http://cdn.shopify.com/s/files/1/2525/8632/products/71g5ObweaNL._SL1200_1200x1200.jpg?v\u003d1527381789 "PDF] Arduino cours et formation gratuit")





 - Elektor")
![PDF] [EPUB] Arduino programming for beginners: How to learn and](https://images-na.ssl-images-amazon.com/images/I/511hDnuIBtL.jpg "PDF] [EPUB] Arduino programming for beginners: How to learn and")
 50 montages pédagogiques avec Arduino")
 Programming Arduino - telechargez pdf](https://www.dlf.pt/dfpng/middlepng/330-3308800_arduino-uno-r3-arduino-programming-codes-pdf-hd.png "PDF](+83????️) Programming Arduino - telechargez pdf")